







简介
泰曼格林干涉仪作为分振幅干涉技术的核心应用设备,凭借对光学元件表面质量、形状误差及系统波前畸变的高精度检测能力,成为光学制造与检测领域的关键工具。本案例采用 OAS 光学软件,以束腰半径 10mm、波长 0.6328μm 的光束为光源,模拟泰曼格林干涉过程,旨在验证软件对干涉现象的模拟精度,为实际检测提供理论参考与操作依据。
案例设置与操作
光源参数设置
本案例选用高斯光束光源,其参数设置贴合实际干涉检测需求:束腰半径设定为 10mm,可完全覆盖直径≤20mm 的中小尺寸光学元件待检测区域,避免光束边缘切割导致条纹信息缺失。
波长 0.6328μm 为氦氖激光的特征波长,该波长具有稳定的单色性与较长的相干长度(约 30cm),能满足干涉测量中 “两束光光程差小于相干长度” 的核心条件。同时,光源的时间相干性对比度设定为 96%、空间相干性系数设定为 0.99,确保两束干涉光具备清晰的明暗对比,为后续条纹分析提供高质量图像基础。
光学系统建模
OAS 软件通过参数化建模模块构建完整泰曼格林干涉系统:核心部件分束器采用 50:50 非偏振分光比设计,保证参考光与测试光强度均衡,避免光强差异导致条纹对比度下降;参考镜按理想平面模型构建,平面度误差控制在 λ/20(λ 为光源波长)以内,作为基准波前的反射载体。
待检测元件按典型凸透镜模型构建,并预设 0.5λ 的局部面形误差,用于验证模拟系统的缺陷识别能力。此外,软件通过光路准直算法校准两光路,使参考光与测试光的平行度误差≤1 角秒,光程差控制在 ±3mm 范围内,完全满足干涉条件。
波前追迹与干涉模拟
软件采用矢量波前追迹算法,对两束光的传播过程进行精准计算:参考光经参考镜反射后,保持平面波前特性;测试光经待检测元件反射后,因预设面形误差产生周期性相位起伏,形成畸变波前。
两束波前在分束器二次分光后汇合,基于光的叠加原理,软件实时计算探测器平面的光强分布。探测器设置为 1024×1024 像素分辨率,采样频率匹配光束空间分布,最终在探测器窗口清晰捕捉到包含待检测元件缺陷信息的干涉条纹。
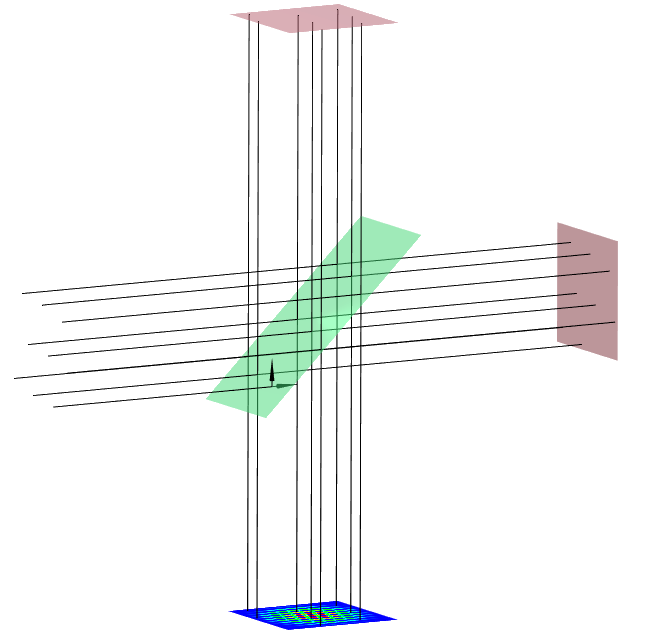
泰曼格林干涉仪的三维追迹图
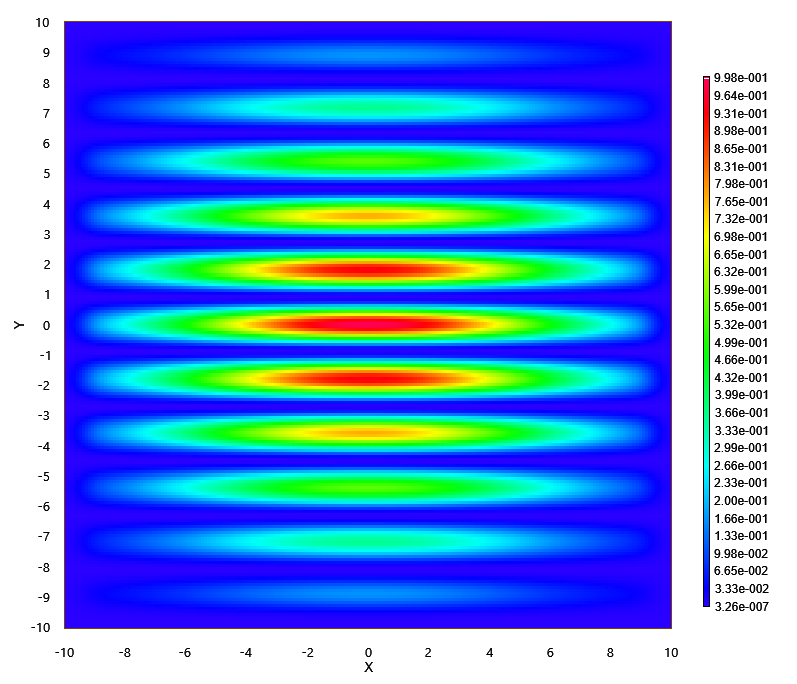
泰曼格林干涉仪的探测器结果图
总结
通过OAS软件仿真案例不仅缩短了泰曼格林干涉仪的调试周期,还可规避物理实验中的环境干扰(如振动、温湿度变化)。在实际应用中,可进一步扩展至天文望远镜反射镜面形检测、激光谐振腔波前校准等场景,为光学制造、激光技术及科研领域提供高效、低成本的虚拟检测方案,推动光学检测技术向数字化、智能化升级。